





ステッピングモータードライバーサブディビジョンの役割 skysmotor.com
ステッピング モーター ドライバーのサブディビジョンの主な機能は、モーターの振動を低減することです。その原理は、フルステップ駆動時にステップ角で各相の電流をn段階で徐々に増加させ、ロータを吸引する力がゆっくりと変化するようにするものです。ロータが力のつり合い点で静止するたびに全ステップ角をn分割することでロータをスムーズに回転させることができ、低速走行時の振動低減に有効な手段となります。
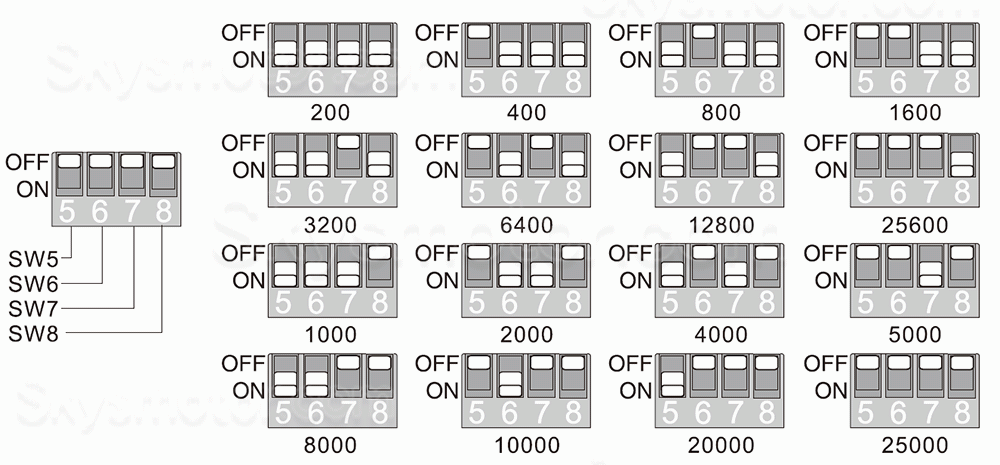
以下の図に示すように、ドライバーはダイヤル スイッチを通じて複数のギアの細分化 (ステップ/回転) を選択できます: 200、400、800、1600、3200、6400、12800、25600、1000、2000、4000、5000 、8000、10000、20000、25000
海外では、ステッピング システムには、2 相ハイブリッド ステッピング モーターとそれに対応するサブディビジョン ドライバーが主に使用されています。しかし、国内では「細分化」というものをあまり知らないユーザーが多く、精度を高めるために細分化するものだと思っている人もいますが、実はそうではなく、主にモーターの動作性能を向上させるために細分化が行われています。ステッピングモーターの細分化制御は、ドライバーにより、ステッピングモーターの相電流を正確に制御して実現されます。二相モーターを例にとると、モーターの定格相電流が 2A の場合、従来のドライバー(一般的に使用されている定電流チョッパー方式など)でモーターを駆動すると、モーターが 1 ステップ動作するたびに、巻線の電流は 0 から 2A、または 2A から 0 に変化します。相電流の大きな変化は、必然的にモーターの動作時に振動や騒音を引き起こします。サブディビジョン ドライバーを使用して 10 サブディビジョンの状態でモーターを駆動すると、モーターが 1 マイクロステップで動作するたびに、巻線の電流は 2A ではなく 0.2A だけ変化し、電流は正弦波パターンで変化します。モーターの振動や騒音も改善されるため、性能面でのメリットは細分の本当の利点です。細分化されたドライバーはモーターの相電流を正確に制御する必要があるため、ドライバーには非常に高い技術要件とプロセス要件が必要となり、コストも高くなります。
下図に示すように4細分ステップの電流波形とモータロータの動作位置を示します。各相電流のピーク値は等しく、位相偏差は90°です。一般に、この細分方法を使用し、細分ステップの細分量を大きくすると、電流波形を正弦波に近づけることができます。
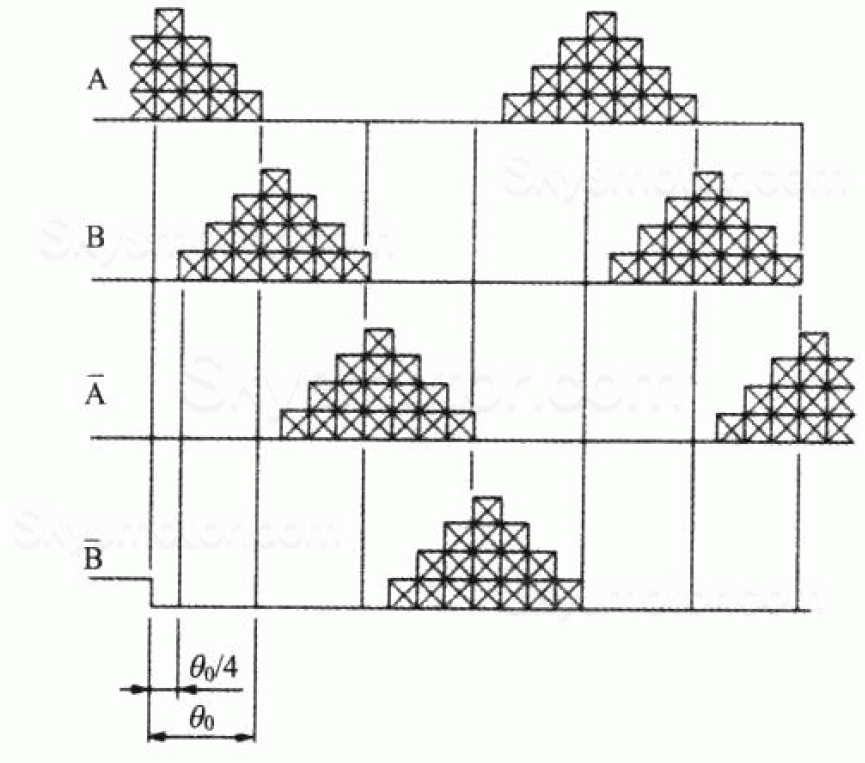
4細分ステップ電流波形
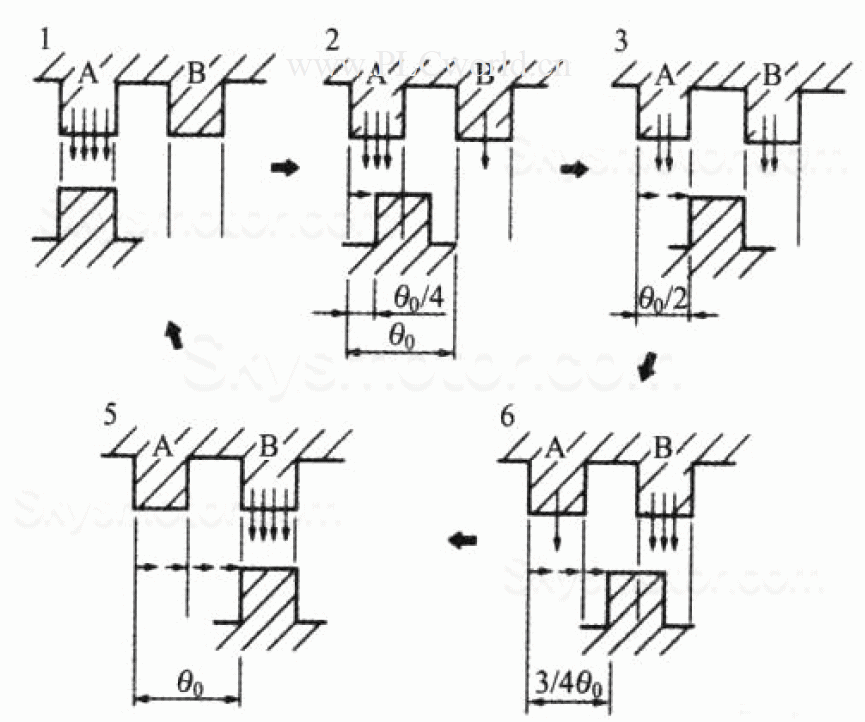
4細分ステッピングローター位置
サブディビジョン ステップを使用して振動を解決する場合は、次の点にも注意する必要があります。1. 細分化ステップは低速運転時に効果が優れています。入力パルスの周波数が速すぎると、細分化されたステップ波形に対して所望の電流波形が得られず、モータの追従精度が悪くなります。2. 理論的には細分数が多いほど振動低減効果が顕著になりますが、実際には 8 分割ではあまり効果がありません。
前の編:Raspberry Piでステッピングモーターを接続するにはどうすればよいですか?
次の編:ステッピングモーターの一般的な駆動方法は何ですか?
No reviews
