





Raspberry Piでステッピングモーターを接続するにはどうすればよいですか? skysmotor.com
Raspberry Pi は、発売以来、多くのコンピューター愛好家やメーカーに求められており、かつては「Pi」をを購入するのが困難でした。見た目は「小柄」ですが、中身は非常にパワフルで、映像や音声などのあらゆる機能を備えており、「小さいながらも内臓がすべて揃っている」とも言えるスズメです。この記事では主にRaspberry Pi経由でステッピングモーターを接続する方法を紹介します。
ステッピングモーターの選択
ステッピングモーターにはユニポーラステッピングモーターとバイポーラステッピングモーターの2種類があり、駆動方法が異なりますので、まずステッピングモーターについて確認する必要があります。
サーボ モーターに対するステッピング モーターの主な利点は、モーターシャフトの完全な回転が複数のステップに分割され、モーター コイルに通電することによってステッピング モーターを正確に位置決めできることです。サーボ モーターのようなフィードバック機構がなくても、ステッピング モーターのステップ角は小さく、非常に正確な角度位置決めを提供できます。このプロジェクトでは、単純な 12V バイポーラ ステッピング モーターが使用されます。
ドライバーモジュールの選択
Raspberry Pi でこのステッピング モーターを駆動するには、L293D や L298N などのモーター ドライバー モジュールを接続する必要があります。どちらのモジュールも 12V ステッピング モーターに適しています。したがって、ドライバーモジュールの選択はあなた次第ですが、ここではL298Nモータードライバーモジュールが選択されました。
L298Nは専用ドライバ集積回路であり、Hブリッジ集積回路であり、L293Dとの違いは出力電流が増加し、パワーが強化されている点です。出力電流は 2A、最大電流は 4A、最大動作電圧は 50V で、高出力 DC モーター、ステッピングモーター、ソレノイドバルブなどの誘導負荷を駆動できます。マイコンに直結しているため、マイコンによる制御が容易です。DCモーターを駆動する場合、入力端子の論理レベルを変更するだけでステッピングモーターを直接制御し、モーターの正転・逆転を実現できます。
Raspberry Piをステッピングモーターに接続する
下の画像は、L298N を使用した Raspberry Pi ステッピング モーター制御の接続図を示しています。Fritzing Applicationを使用して実現されます。
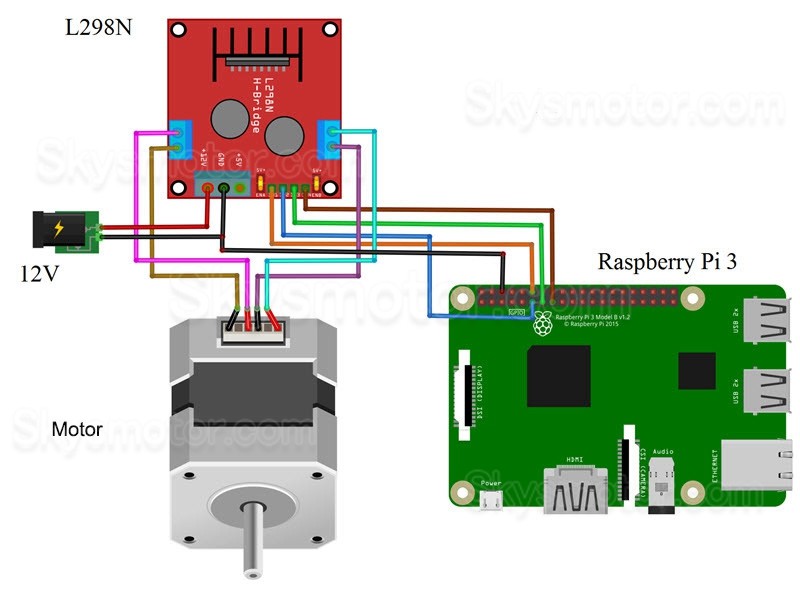
モーター ドライバー モジュールの入力 (IN1、IN2、IN3、IN4) は、物理ピン 11、12、13、15 (Raspberry Pi の GPIO17、GPIO18、GPIO27、GPIO22) に接続されています。1組のモーターコイルはモータードライバーのOUT1とOUT2に接続され、もう1組はOUT3とOUT4に接続されます。モータードライバーモジュールに 12V の外部電源を供給するために、L298N モータードライバーモジュールと Raspberry Pi のグランド端子は共通です。Raspberry Pi に別の 5V 電源を供給します。
この単純なプロジェクトの目的は、Raspberry Pi と L298N を使用してステッピング モーターを接続する方法を理解することだけです。このプロジェクトの作業は非常に簡単なので、ここで説明します。
前の編:遊星ギアボックスの分類
次の編:ステッピングモータードライバーサブディビジョンの役割
No reviews
