





サーボモータとして使用できるDCモータの種類は何ですか? skysmotor.com
サーボ モーターは、位置、速度、トルクの正確な制御が必要なアプリケーションに使用されます。しかし、さまざまなタイプのモーターがサーボモーターとみなされることができ、サーボ モーターの決定的な特徴は、閉ループ システムでフィードバックを使用または読み取ることです。実際、多くのサーボ アプリケーションでは同期 AC モーターが使用されていますが、サーボ システムでは DC モーターも使用できます。
同期 AC モーターは通常、ブラシレスです (汎用モーターを除く。ブラシによって機械的に転流され、AC または DC 電源で動作できる)。同様に、サーボ システムで使用される DC モーターは、最も一般的にはブラシレス モーター (BLDC モーターと呼ばれることが多い) です。
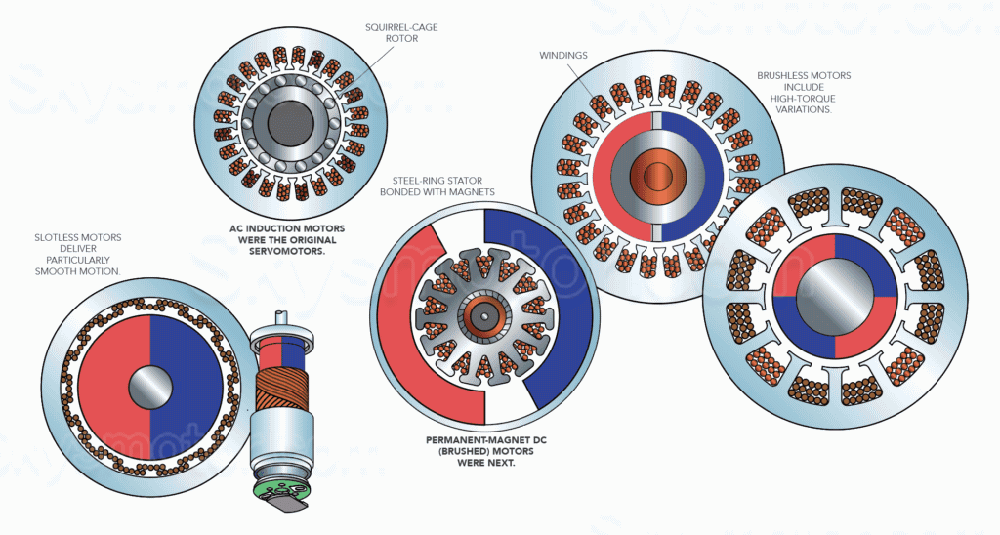
ブラシ付き DC モーターはサーボシステムで動作することができますが、機械的なブラシと整流子により、必要な摩耗とメンテナンスは、ほとんどのサーボ アプリケーションには適さないことに注意してください。この記事では、サーボシステムでブラシ付き DC モーターを使用することがどのような場合に有利であるか、特にどのタイプのブラシ付き DC モーターがサーボ アプリケーションに最適であるかについて説明します。

整流は機械的ではなく電子的に行われるため、ブラシレス DC モーター (左) は、ブラシ付き DC モーター (右) よりもローターの慣性が低く、効率が高く、メンテナンスの必要性が少なくなります。
ブラシレス DC モーターは、ローター上の永久磁石とステーター上のコイルを使用して回転 (およびトルク) を生成します。この構成は同期 AC モーターに似ていますが、BLDC モーターと同期 AC モーターの主な違いは、ステーター コイルの巻き方です。同期 AC モーターでは、コイルは正弦波パターンで巻かれており、整流は連続的な正弦波波形になります。これにより、同期 AC モーターに非常にスムーズな性能が与えられます。一方、BLDC モーターはステーター コイルが台形に巻かれており、転流が 6 段階 (60 度ごと) で発生するため、トルク変動が発生する可能性があります。
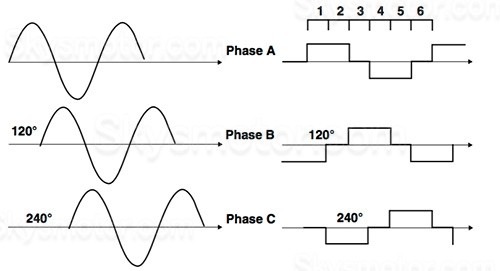
同期 AC モーターと BLDC モーターのそれぞれの正弦波 (左) と台形波 (右) の電流波形。
BLDCモーターの構造変化
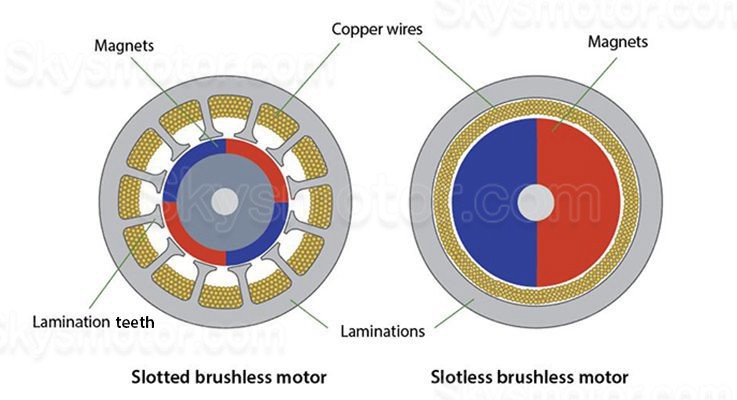
ブラシレス DC モーターは通常、スロット付き鋼板積層体とスロットに挿入された銅巻線で作られたステーター構造を採用しています。スロット付き設計は、モーターの中心にあるローターとローターを囲むステーターで構成されます (「インナーローター」または内部ローター設計と呼ばれることもあります)。これによりモーターの慣性が低減され、非常にダイナミックなパフォーマンスが可能になります。
また、溝付きブラシレス DC モーターは、モーターの中心にある溝付きステーターとステーターを囲むローター磁石で構成できます。 (「アウターローター」またはアウターローター設計と呼ばれることもあります)。これにより、モーターは高トルクを生成し、より短い全長 (「フラット」設計として呼ばれる) で構築できますが、ローターの慣性が増加するためダイナミクスが低下します。
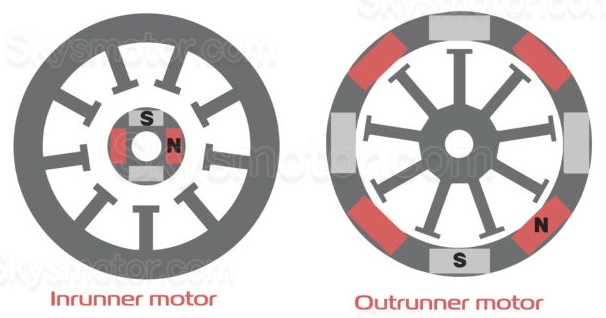
スロット付きモーターは、インナーローター、またはアウターローター設計を採用することができます。
スロット付き BLDC モーターは、インナー ローターで構成されているかアウター ローターで構成されているかに関係なく、ローターの永久磁石がステーターのスロットと位置合わせしようとするため、コギング トルクの影響を受けます。コギング トルクの主な影響は、特に低速のモーター速度でモーターの回転が不安定になることです。
BLDC モーターの最新の配置はスロットレス設計です。この設計では、スロット付き鋼板積層を排除し、代わりに、巻線がエポキシで封止された、互いに積み重ねられた鋼鉄リングで作られた固定子を使用します。巻線は、ステーター積層板とローター (モーターの中心に位置) の間のエアギャップに配置されます。スロットレス設計により、コギングトルクが排除され、可聴ノイズが低減され、インダクタンスが低減されるため、スロット付き設計と比較して加速性と動的応答が向上します。
BLDC モーターは通常、高効率、高信頼性、良好なトルク密度 (特定のサイズでのトルク生成) を必要とするサーボ アプリケーションで使用されますが、大型の同期 AC モーターが提供できるほどのトルクはありません。BLDC サーボ モーターの一般的な用途には、ロボット ジョイント、医療機器、包装機器などがあります。ブラシレス DC モーターは、バッテリー駆動の機器や、モーターを機械設計に直接統合する必要があるアプリケーションにも最適です。
前の編:ステッピングモーターの精度不足を補うにはどのような方法がありますか?
次の編:ステッピング モーターに過電圧を印加することが安全かつ一般的なのはどのような場合ですか?
No reviews
