





ステッピングモーターの構造と3つの制御モード skysmotor.com
今日のスマート時代では、ステッピングモーターはその独特の開ループ位置制御性能により広く使用されています。各機器には、ステッピングモーターの回転中の出力トルクの滑らかさに関する特定の要件があります。回転の安定性はステッピングモーターの本体構造だけでなく、ステッピングモーターの制御方法とも密接に関係しています。
この記事では、バイポーラステッピングモーター、その構造、制御モードについて紹介します。
バイポーラステッピングモーターの基本コンポーネント
ステッピングモーターはブラシレス DCモーター(BLDC) で、等しい長さのステップで段階的に回転します。バイポーラステッピングモーターは、各相に 1 つの巻線を備えたステッピング モーター、具体的には 2 相 4 線式ステッピング モーターです。これは、ステーターとローターという 2 つの主要コンポーネントで構成されます (図 1 を参照)
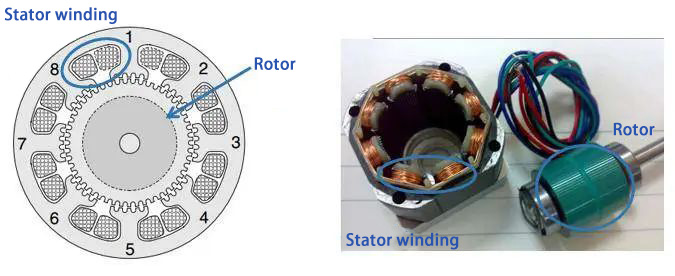
図1:バイポーラステッピングモーターの構造図
ステーター
ステータはモーターの静止部分です。8 つのステータはそれぞれ 2 相バイポーラ巻線で巻かれており、各ステータ コアには 5 つの歯があります (図 1 を参照)。
A 相巻線はステータ 1 から始まり、ステータ 3、5、7 に順番に巻かれます (図 2 を参照)。ステータ 1 と 5 の巻線方向は同じであり、ステータ 3 と 7 の巻線方向も同じであることに注意してください。これら 2 つのグループ (ステーター 1 と 5、およびステーター 3 と 7) の巻き方向は逆です。B 相巻線も同じ原理で巻かれ、ステータ 4 と 8 がグループを形成し、ステータ 2 と 6 がグループを形成します。
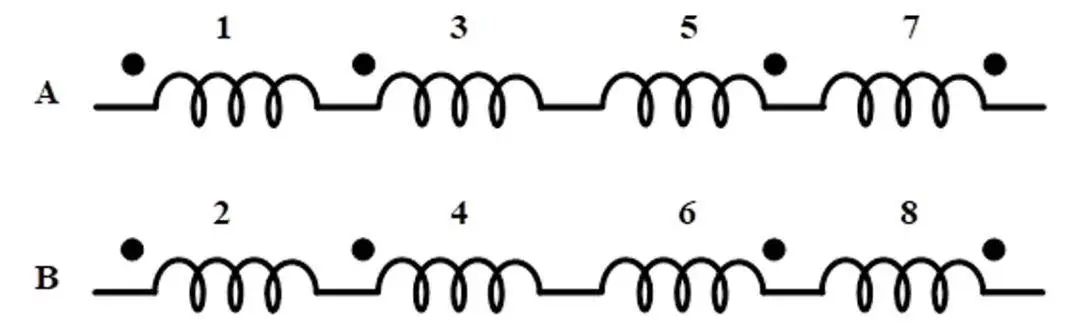
図 2: バイポーラステッピングモーターの巻線の概略図
ローター
通常、ローターには軸方向に磁化された永久磁石が取り付けられています。 図3にロータの構造を示します。

図3:ローター構造の模式図
図 4 にロータの側断面図を示します。
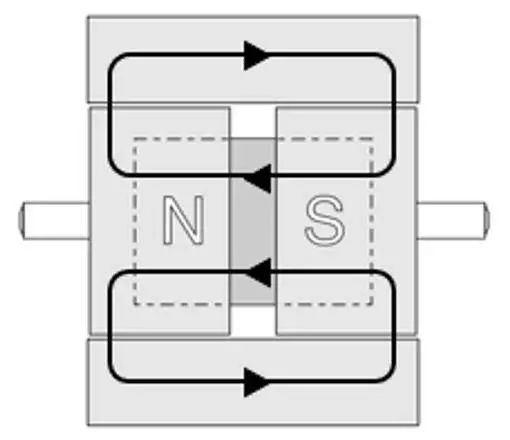
図 4: ローター側の断面図
永久磁石の磁力線はモーター本体内でクローズドを形成します。磁力線と磁気抵抗効果により、ステッピング モーターには電力が供給されていないときでも一定のロック トルクがあります (図 4 を参照)。
ローターにはステーターギアの反対側に 50 個の歯があり、この歯数と位相構造により、1.8 度のステップ角があります (図 5 を参照)。ステップ角度: 電気サイクルが 90 度完了し、ステッピング モーターのローターが前進する機械的角度。
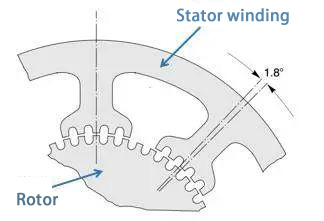
図 5: 1.8° ステップ角構造の概略図
ステップモード
以降の制御方法の説明を容易にするために、複雑な構造図を簡略化して模式図にします (図 6 を参照)。
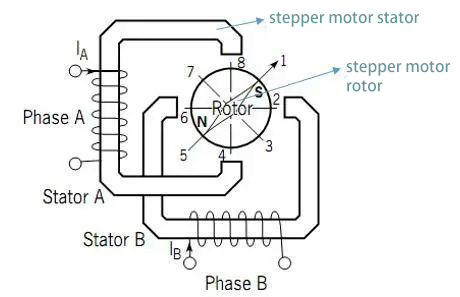
図 6: バイポーラ ステッピング モーターの簡略化した回路図
ステッピング モーターのステーターとローターには歯が 1 つしかないように見えるため、ステッピング モーターの駆動方法が他のモーターとは異なります。この方式はデュアル フルブリッジドライバと呼ばれ、A 相巻線が 1 番目のフルブリッジ ドライバに接続され、B 相巻線が 2 番目のフルブリッジ ドライバに接続されます (図 7 を参照)。
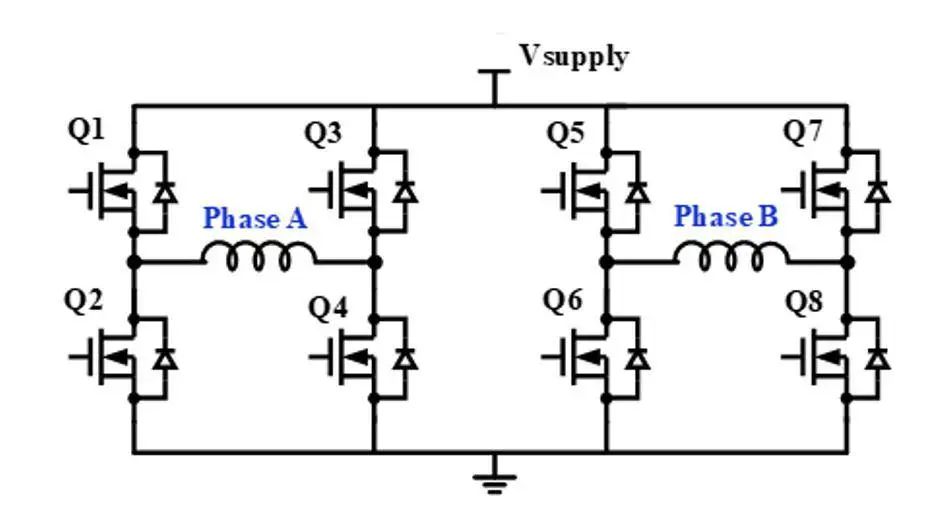
図 7: デュアルフルブリッジ駆動回路図
バイポーラ ステッピング モーターには、単相ステッピング、フルステップ ステッピング、ハーフステップ ステッピングの 3 つの制御モードがあります (表 1 を参照)。
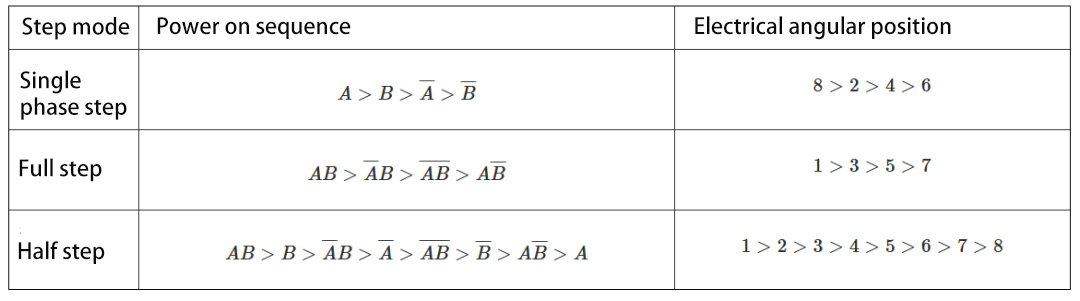
表 1: ステッピングモード表
単相ステップ
単相ステップモードで A 相と B 相が順次通電されると、それに応じてステーターの磁界が変化し、極性引力によりローターも回転します。A相、B相(AB)の通電シーケンスとロータの回転位置の詳細を表1に示します。
単相ステッピング プロセスには、具体的には次の 3 つのステップが含まれます:
・Aに電源を投入するとQ1からQ4へ駆動電流が流れます。 このとき、ステータ A の上端は N、下端は S にあり、ロータは位置 8 まで回転します (図 6 を参照)。
・次にB相が通電され、Q5からQ8へ駆動電流が流れます。 このとき、ステータBの左端がS、右端がNとなり、ロータは位置2まで回転します(図6参照)。
・次の 2 つの状態の原理は上記と同様です。この通電シーケンスが繰り返された後、ローターが回転し始めます。
図8に単相ステップAB相の電流波形を示します。
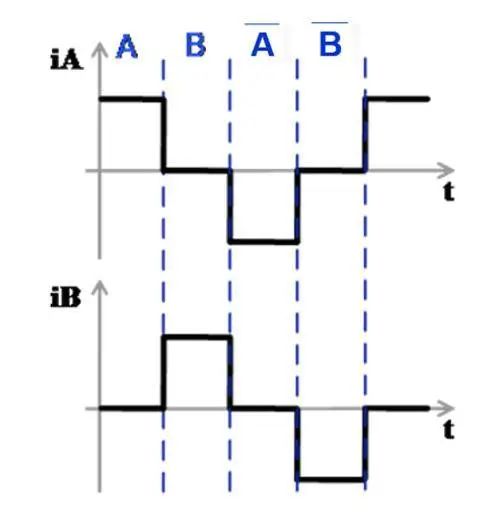
図8:単相ステップAB相電流波形図
フルステップ
単相ステップとは異なり、フルステップの AB 巻線は同時に通電されます。対応する 4 つの通電モードとロータの電気的位置もありますが、それらの位置空間は電気空間における単相ステップとは異なります。ローターは、電源投入シーケンス全体に従って回転することもできます。図 9 に、AB 相のフルステップ電流波形を示します。
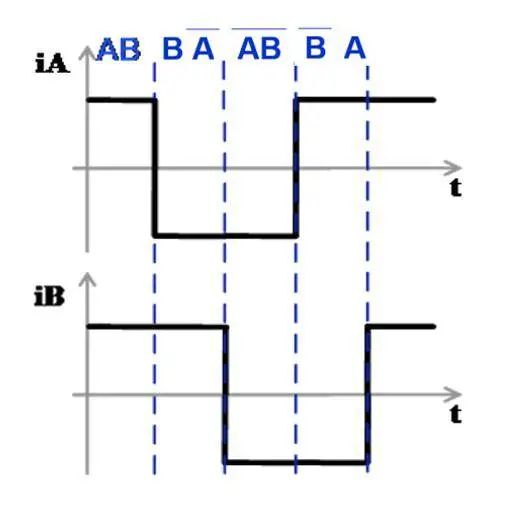
図 9: フルステップ AB 相電流波形図
ハーフステップ
ハーフステップモードは、単相ステップとフルステップステップの 2 つの制御方法を組み合わせたもので、より多くの電気角位置、より詳細な電流波形、よりスムーズな回転を実現します。
図 10 は、単相から二相動作への非周期ハーフステップ モードを示しています。 このモードはフル ステップとハーフ ステップを交互に切り替えて 8 ステップ シーケンスを生成します。
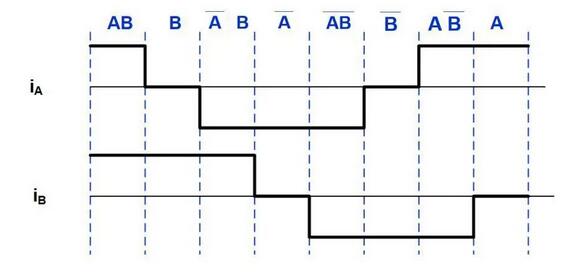
図 10: 非周期ハーフステップ モード
前の編:ステッピングモーターの脱調の一般的な原因の分析と解決策
次の編:産業用アプリケーション向けにソレノイドおよびステッピングモータードライバーを改造する方法について
No reviews
